项目概述
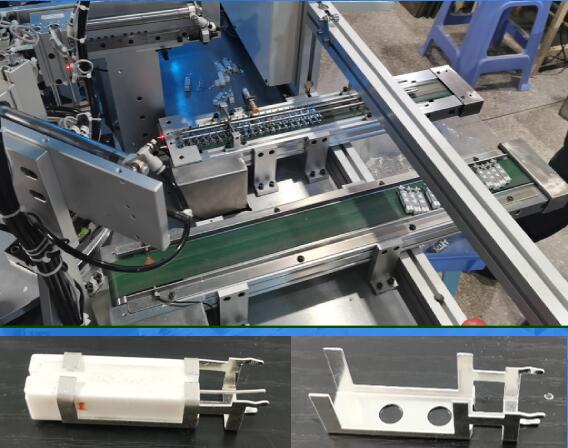
本项目采用人工马架上料,机械手通过视觉定位自动抓取物料盘内的方向水泥电阻。
本设备分为8道工序,1马架上料 2扩口 3机械手定位抓取电阻、剪脚、组装 4预压 5折脚 6折针 7焊接 8下料
设备的难度在于马架来料的一致性和焊接的稳定性,本设备通过结构优化,可很大程度的解决上述问题。


本项目采用人工马架上料,机械手通过视觉定位自动抓取物料盘内的方向水泥电阻。
本设备分为8道工序,1马架上料 2扩口 3机械手定位抓取电阻、剪脚、组装 4预压 5折脚 6折针 7焊接 8下料
设备的难度在于马架来料的一致性和焊接的稳定性,本设备通过结构优化,可很大程度的解决上述问题。
 添加微信联系我们
添加微信联系我们